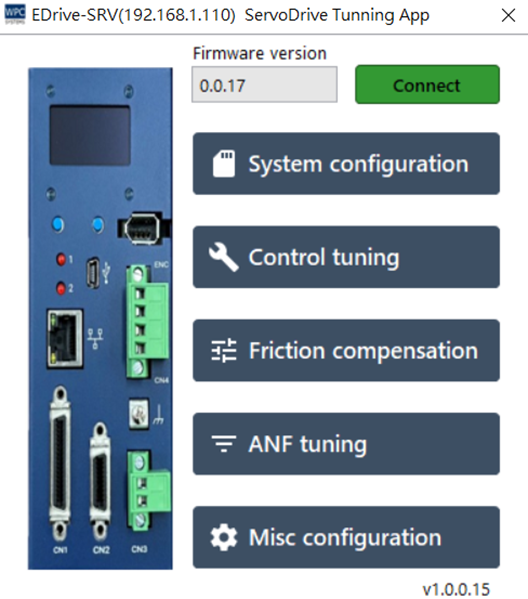
Servo Drive
WPC-EDrive-SRV 是一款具備網路介面的單軸伺服馬達整合型驅動器。透過 Servo Drive 面板,使用者可以直觀地設定驅動器參數、執行馬達調機程序 (Auto-tuning) 以及進行運動控制測試。
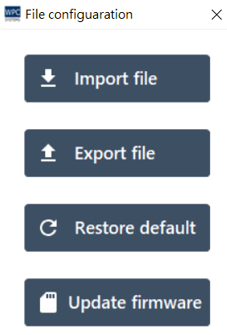
系統管理 (System Configuration)
提供驅動器設定檔管理與韌體更新功能。
| 按鈕功能 | 說明 |
|---|---|
| Import file | 匯入先前的驅動器設定檔 (*.ini)。 |
| Export file | 將目前的驅動器參數匯出備份。 |
| Restore default | 重置驅動器參數至原廠預設值。 |
| Update firmware | 更新 驅動器內部 的韌體 (Firmware)。 |
注意:此處的更新是針對驅動器本體;若是 WPC Device Manager 軟體介面的更新,請透過一般軟體更新流程進行。
控制調教 (Control Tuning)
為獲得最佳的馬達控制表現,初次安裝或更換馬達時,建議依序執行以下調機步驟:
Step 1. 選擇馬達型號
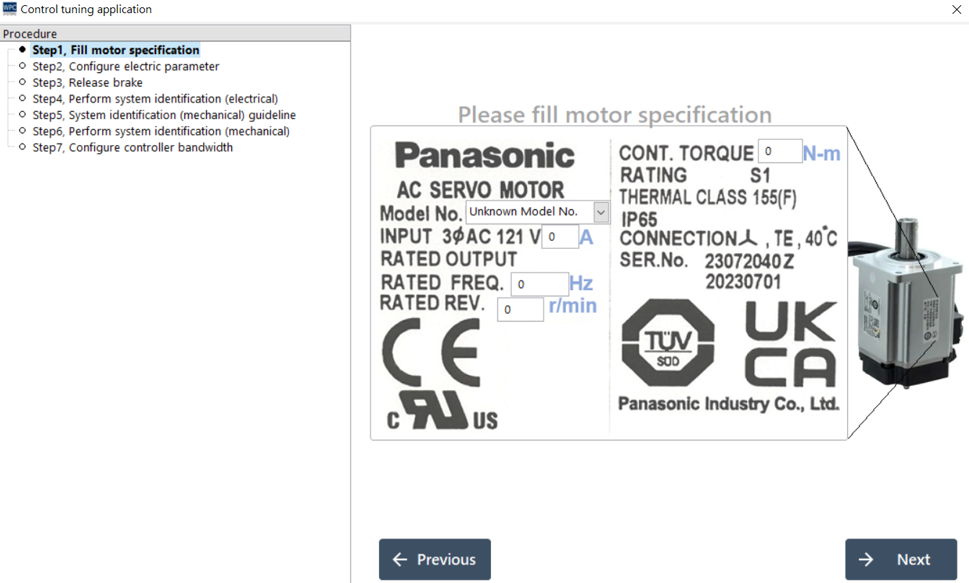
請在 Model No. 下拉選單中選擇您的馬達型號。系統會自動填入對應的額定規格 (扭力、電流、頻率、轉速等)。
若選單中無您的型號,請依據馬達銘牌 (Nameplate) 手動輸入參數。
Panasonic 系列馬達的型號通常標示於馬達側面的貼紙上。
Step 2. 確認電氣參數
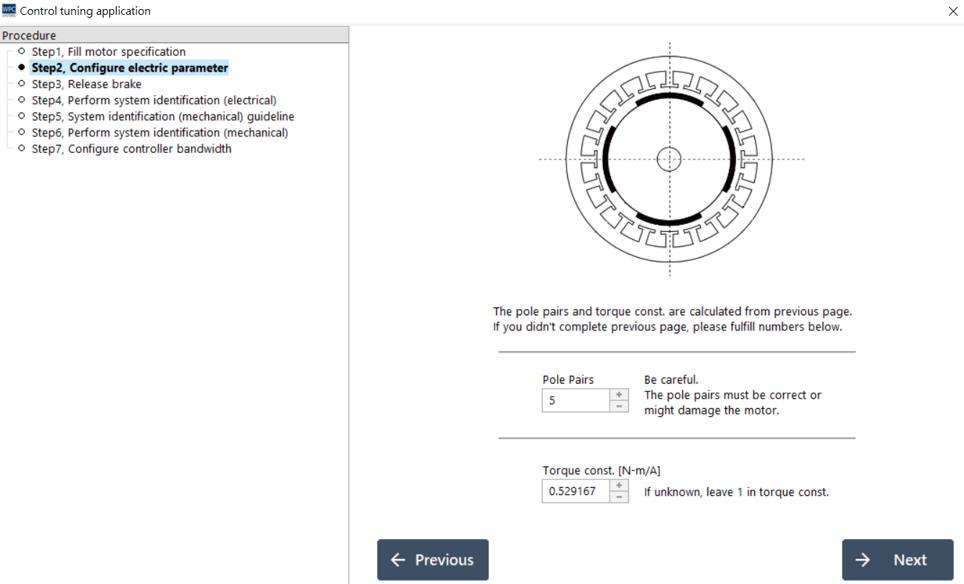
顯示馬達的詳細電氣參數 (如相電阻、相電感)。若上一步驟已正確選擇型號,此處通常不需修改,點擊 Next 繼續。
Step 3. 解除煞車 (Release Brake)
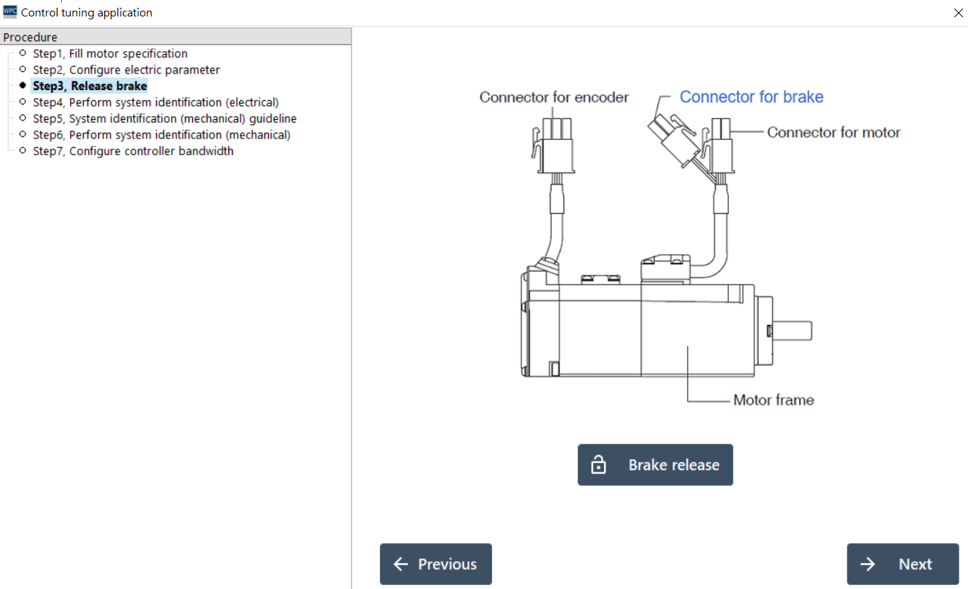
若您的馬達配有煞車 (Brake) 機構,請依照指示解除煞車,以確保馬達軸心可自由轉動。詳細接線請參閱 WPC-EDrive-SRV 硬體使用手冊。
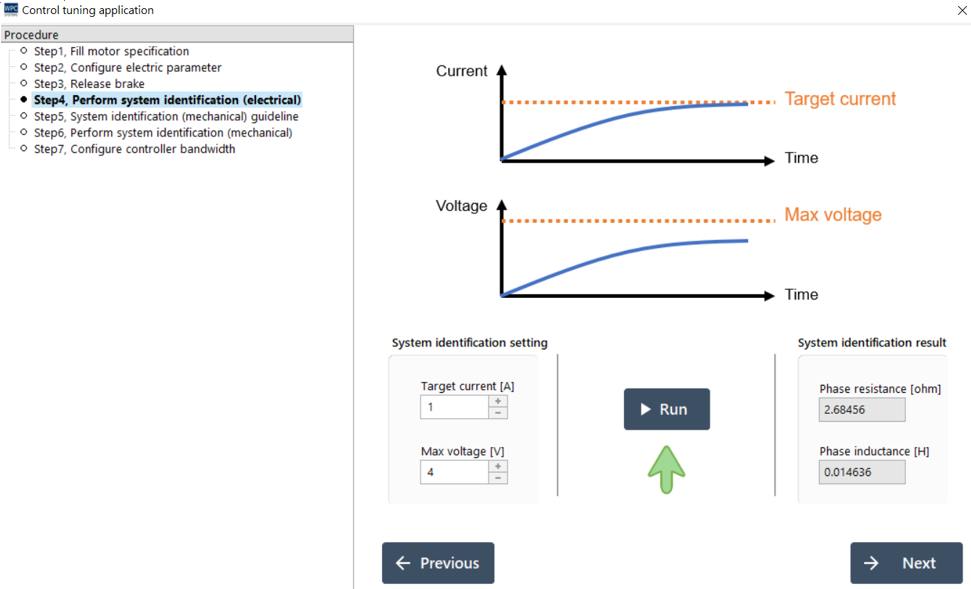
Step 4. 系統鑑別 - 電氣特性 (Electrical ID)
自動測量馬達的實際相電阻與電感值。
- 設定 Target Current (建議至少 0.5A)。
- 按下 Run。
- 馬達將輕微轉動並鎖定,約 2 秒後發出「嗶」長音,且檢測狀態顯示打勾符號,即表示成功。
注意:Target Current 設定值不可超過馬達的最大容許電流,以免損壞馬達。
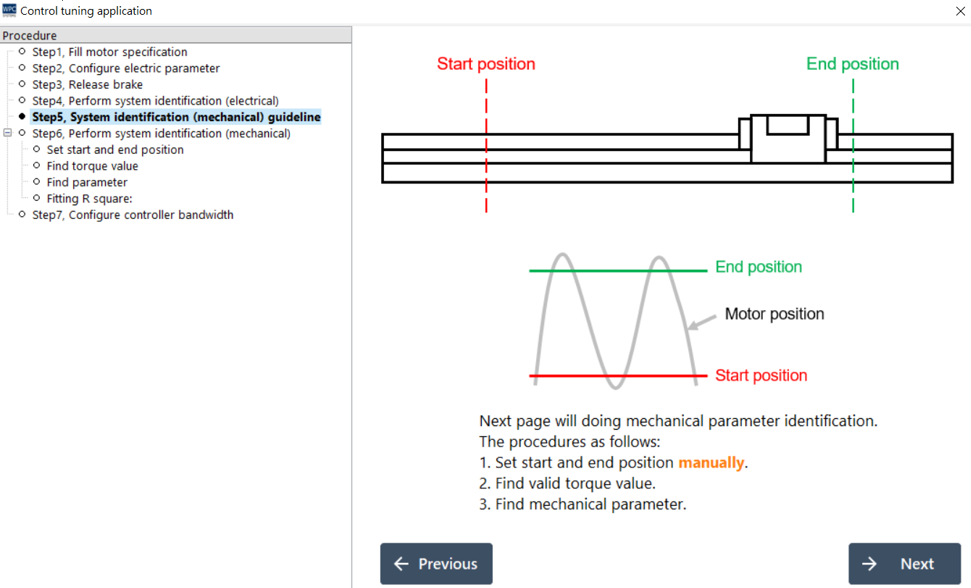
Step 5. 系統鑑別 - 機械特性說明
此頁面為說明頁,請點擊 Next 繼續。
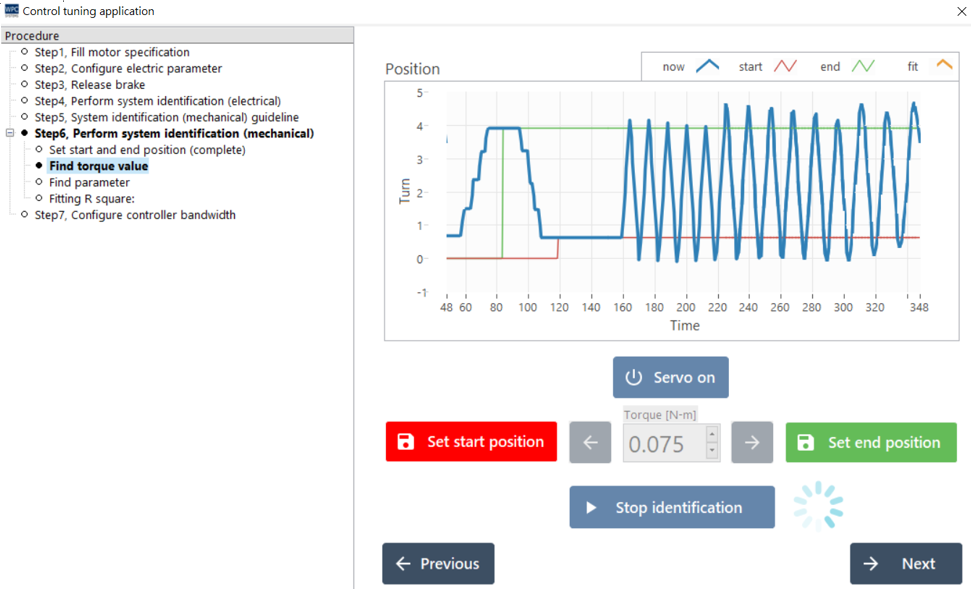
Step 6. 系統鑑別 - 執行機械識別 (Mechanical ID)
自動測量負載慣量、黏滯係數等機械參數。
操作步驟:
- 按下 Servo On 激磁馬達。
- 手動測試並設定一組可使馬達轉動的 Torque 值。
- 操作按鈕將馬達移動至 Start Position (起始點)。
- 操作按鈕將馬達移動至 End Position (結束點)。⚠️ 請確保移動範圍內無機構干涉。
- 按下 Start identification。
- 馬達將在起始點與結束點之間往返測試,並自動調整輸出。
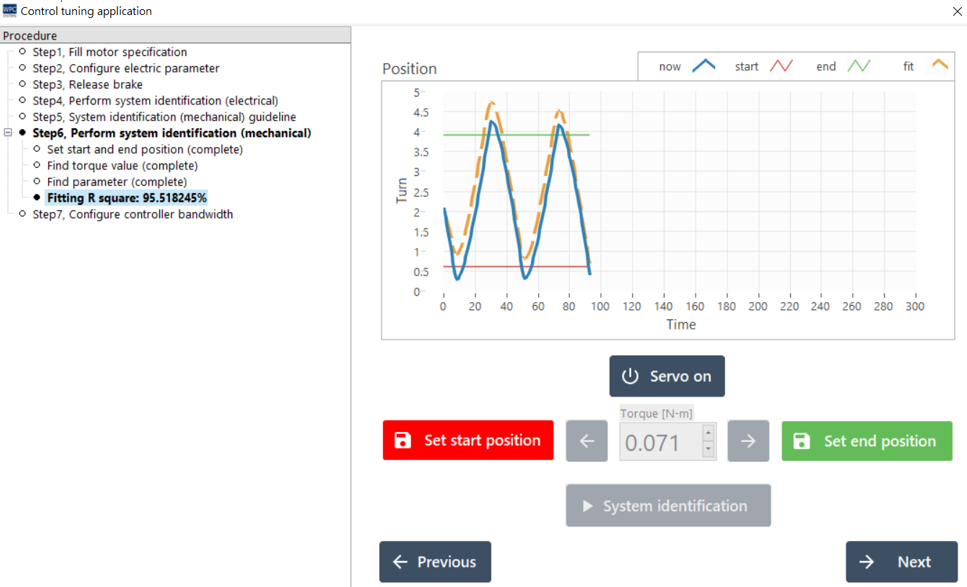
結果判讀:
- 擬合曲線 (右上圖表):橘色虛線應貼近藍色實線。若大幅漂移,可能代表機構配重不平衡 (重力影響)。
- R Square (左側數據):擬合度指標。若大於 80% 即可視為成功,請按 Next 繼續。
Step 7. 設定控制頻寬 (Controller Bandwidth)
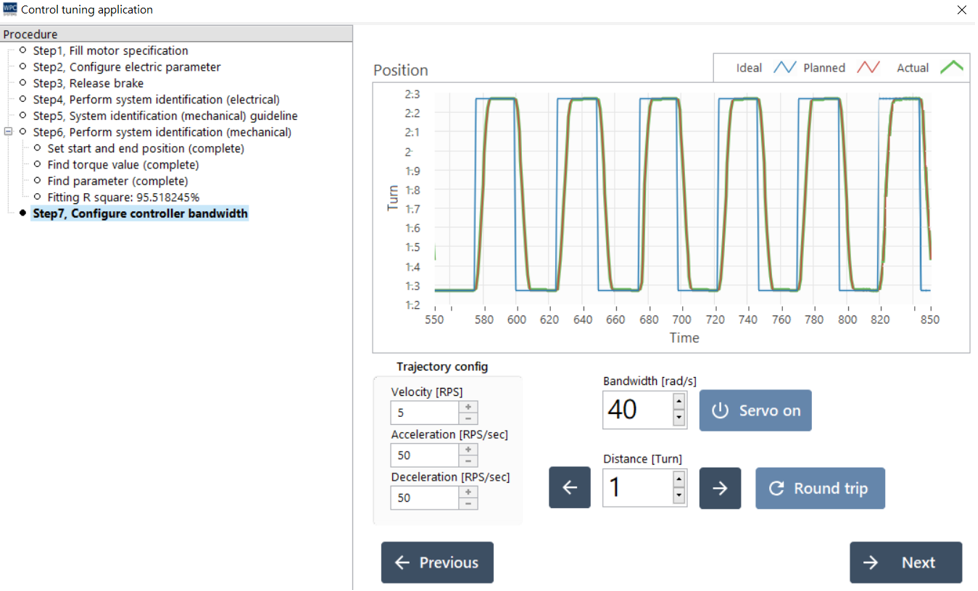
調整馬達的響應頻寬 (Bandwidth)。
- 頻寬越高:響應越快,剛性越強,定位更精準。
- 頻寬過高:可能引發機構共振與噪音。
設定完成後按 Next,系統將詢問是否儲存。選擇 Yes 將參數寫入驅動器並備份設定檔至 (WDM路徑)\data\ServoTune\data\Configs\。
進階功能
摩擦補償 (Friction Compensation)
針對短行程、高精度的移動需求,可開啟此功能以消除靜摩擦力造成的「黏滯滑動 (Stick-Slip)」現象 (即起步時的遲滯或轉折處的停頓)。
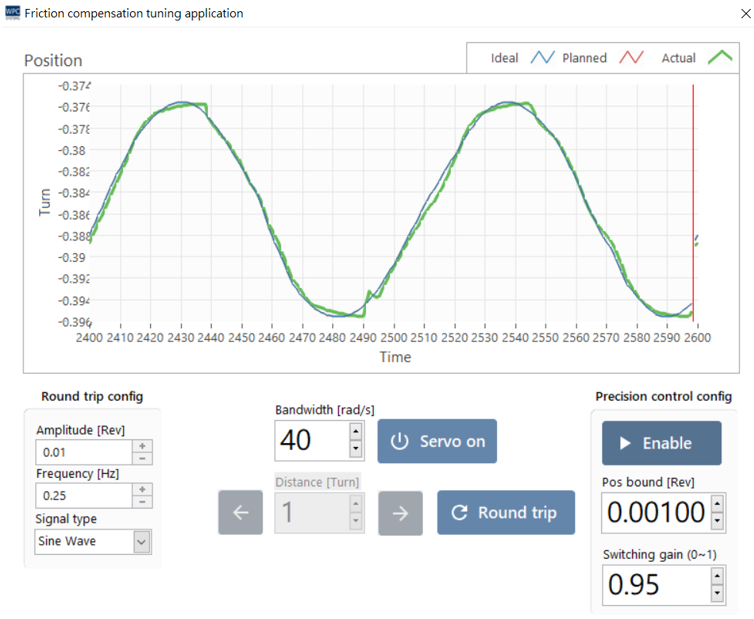
設定步驟:
- 往返測試:設定 Amplitude 與 Frequency,執行 Round trip。
- 啟用補償:設定 Pos bound (建議為振幅的 1/10) 與 Switching gain (預設 0.95)。
- 微調:啟用 Enable,觀察誤差曲線。若仍有影響,可微調 Pos bound 或提高控制頻寬。
自適應陷波濾波器 (Adaptive Notch Filter)
用於抑制機構共振 (Resonance)。當馬達帶動皮帶或懸臂結構時,若產生特定頻率的嗡嗡聲,可使用此功能。
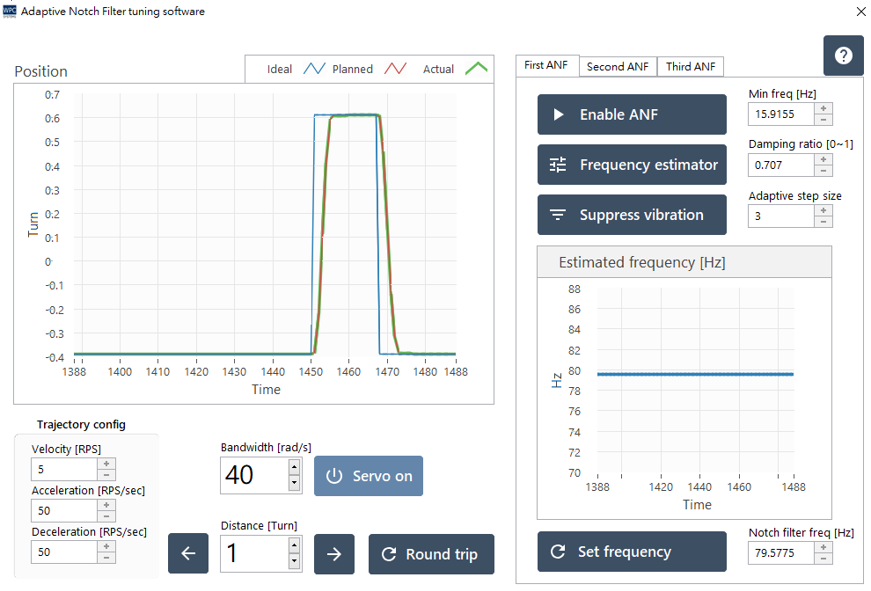
操作步驟:
- 讓馬達進行往返運動 (Round trip),誘發共振聲音。
- 點擊 Enable ANF 開啟濾波器。
- 點擊 Frequency estimator 開始偵測共振頻率。觀察右下圖表,頻率應會收斂至某數值。
- 點擊 Suppress vibration 執行抑制。共振聲應會明顯變小或消失。
- 若聲音消失,關閉估測器並儲存設定。
其他保護設定
電流保護 (Current Protection)
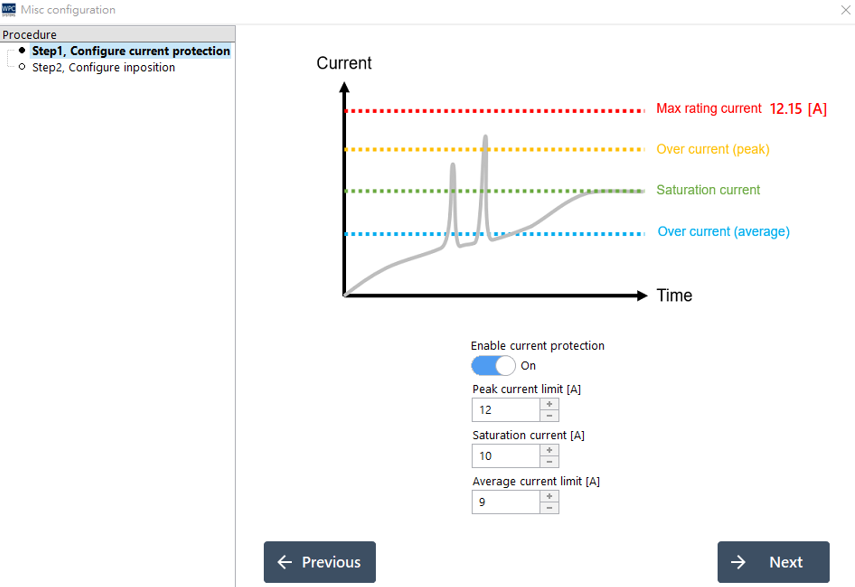
設定過電流保護機制,防止馬達因堵轉或撞機而燒毀。
| 參數 | 說明 |
|---|---|
| Peak current limit | 允許的瞬間最大電流值。 |
| Continuous current limit | 允許的持續電流上限 (均值)。 |
| Saturation current | 驅動器輸出的絕對飽和電流上限。 |
到位判定 (In-Position)
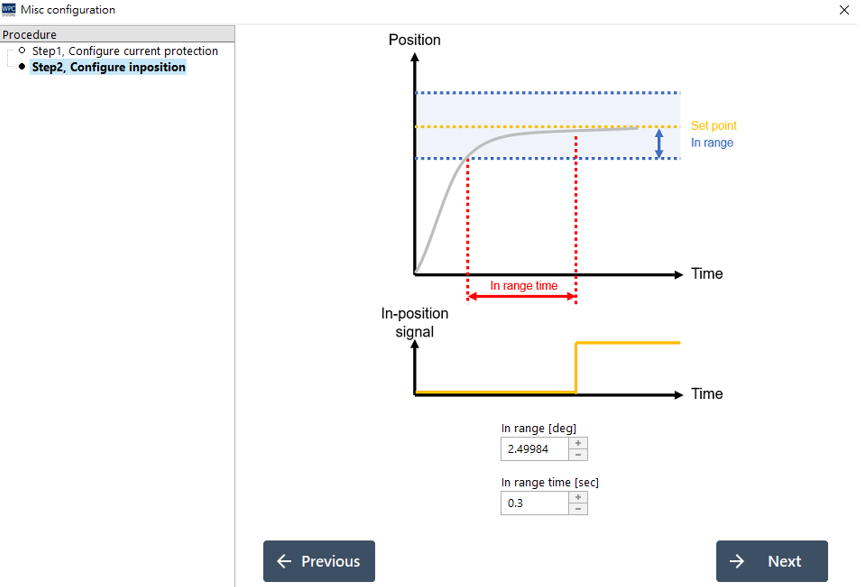
定義「到位 (In-Position)」訊號的觸發條件。
| 參數 | 說明 |
|---|---|
| In range [deg] | 容許的位置誤差範圍。 |
| In range time [sec] | 位置誤差需保持在範圍內的持續時間,滿足此時間才視為真正到位。 |