Motion
Motion (運動控制) 面板提供完整的軸控功能測試環境。您可以即時監控軸卡狀態、設定 I/O 參數、執行原點復歸 (Find Reference)、以及直接下達運動指令控制馬達。
此外,面板支援將當前設定儲存為組態檔案 (*.INI),方便後續程式開發快速載入。
即時狀態監控 (Status Monitor)
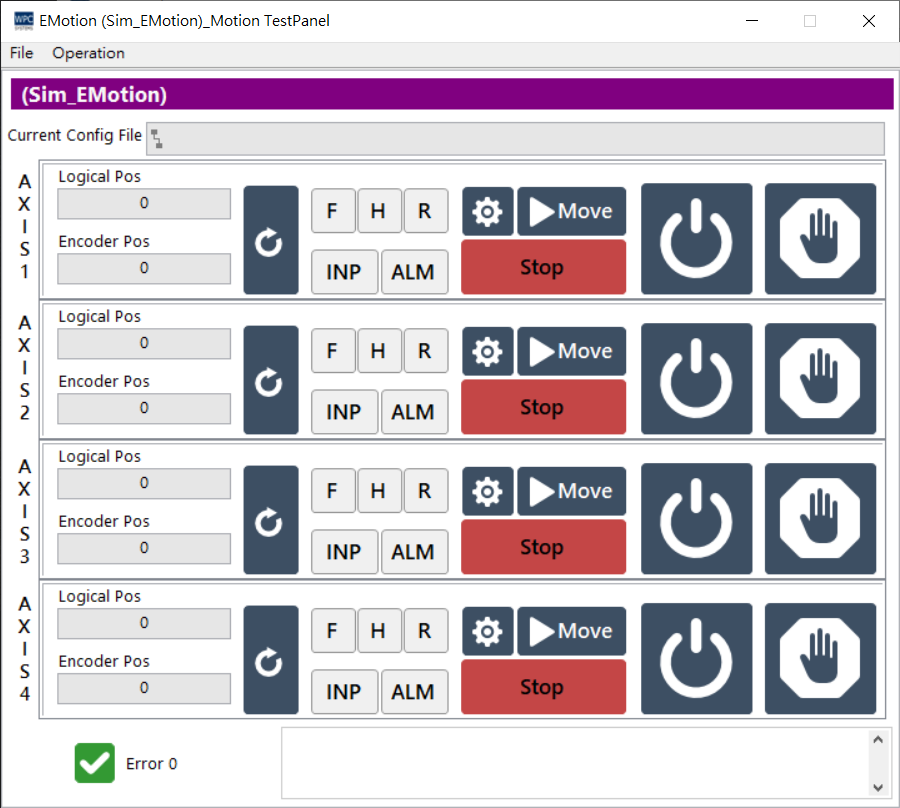
面板上方區域顯示各軸的即時狀態資訊:
| 狀態指示燈/數值 | 說明 |
|---|---|
| Logical Pos | 邏輯位置 (即軸卡輸出的脈波累積位置)。 |
| Encoder Pos | 編碼器 (Encoder) 回授的實際位置。 |
| F | 正向極限 (Forward Limit) 開關觸發狀態。 |
| R | 反向極限 (Reverse Limit) 開關觸發狀態。 |
| H | 原點 (Home) 開關觸發狀態。 |
| INP | 到位訊號 (In-Position),指示馬達是否已到達目標位置。 |
| ALM | 警報訊號 (Alarm),指示驅動器是否發生錯誤。 |
| Stop(紅)/Start(綠) | 馬達運轉狀態指示。 |
功能工具列
| 圖示 | 功能說明 |
|---|---|
| Open Configuration Panel:開啟運動控制 I/O 設定面板。 | |
| Servo On/Off:切換伺服激磁狀態。 | |
| Halt:緊急暫停馬達運轉。 | |
| Interactive Control:開啟互動式移動控制面板。 | |
| Reset Position:重置邏輯位置計數為 0。 |
I/O 設定面板 (Configuration)
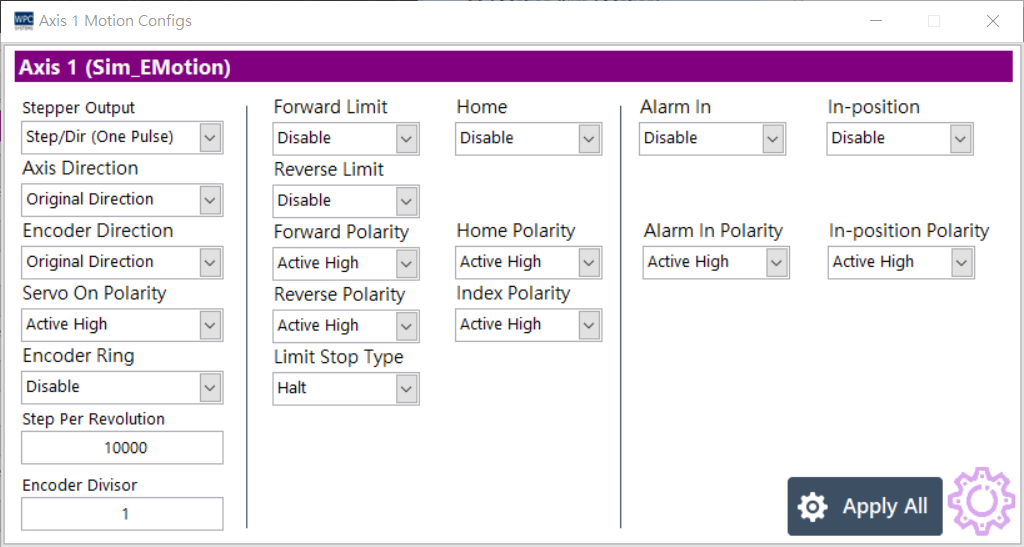
點擊設定圖示後,可針對軸卡 I/O 行為進行詳細組態:
| 參數設定 | 選項 | 說明 |
|---|---|---|
| Stepper Output | Step/Dir (1P)CW/CCW (2P) | 設定脈波輸出模式:單脈波或雙脈波。 |
| Axis Direction | OriginalInverse | 設定馬達旋轉方向。 |
| Encoder Direction | OriginalInverse | 設定編碼器計數方向。 |
| Servo On Polarity | Active LowActive High | 設定 Servo On 訊號的極性。 |
| Encoder Ring | DisableEnable | 啟用或停用環狀計數模式。 |
| Step Per Revolution | (數值) | 設定馬達轉一圈所需的脈波數。 |
| Encoder Divisor | (數值) | 設定編碼器除頻比例。 |
| Limit Protection | DisableEnable | 分別啟用 Forward/Reverse 極限保護。 |
| Signal Polarity | Active LowActive High | 設定 Forward, Reverse, Home, Index, Alarm, In-position 等訊號的極性。 |
| Limit Stop Type | DecelerateHalt | 設定觸發限位時的停止方式 (減速停止或立即煞停)。 |
| Apply All | (按鈕) | 將目前設定套用至所有軸。 |
互動控制與測試
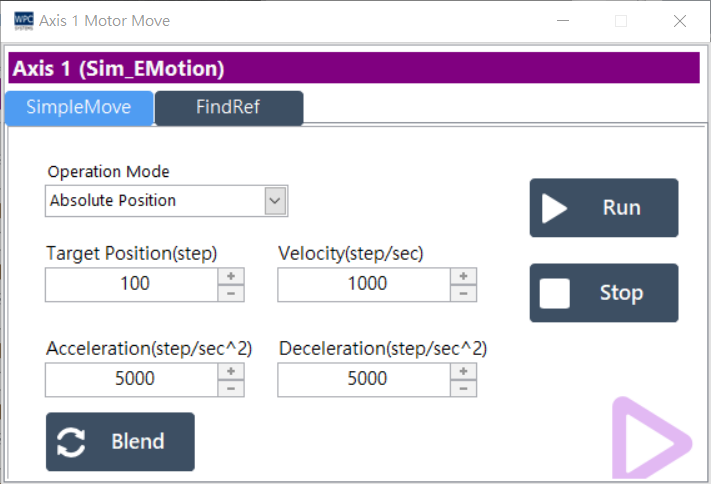
1. 簡易移動 (Simple Move)
提供基本的 PTP (點對點) 移動測試功能。
| 參數 | 說明 |
|---|---|
| Operation Mode | 移動模式選擇: • Absolute:絕對位置移動 • Relative:相對位置移動 • Velocity:速度模式 (連續運轉) |
| Target Position | 設定目標位置 (Step)。 |
| Velocity | 設定運行速度 (Step/sec)。 |
| Accel / Decel | 設定加速度與減速度 (Step/sec²)。 |
| Blend | 用於在運轉中即時更新目標位置或速度。 |
| Run / Stop | 啟動或停止馬達運轉。 |
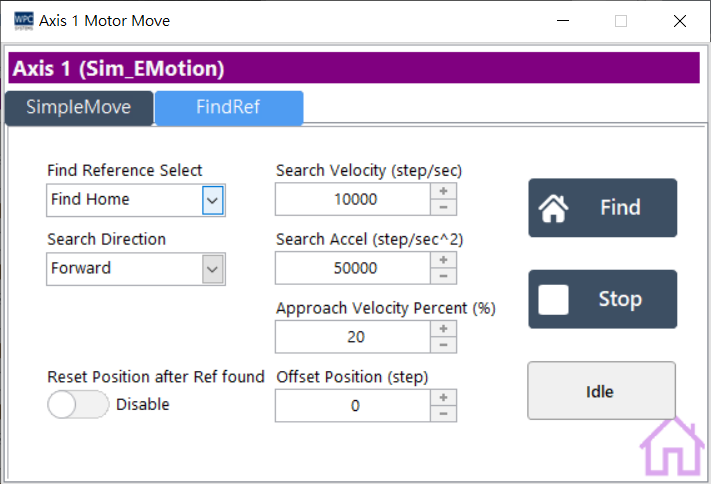
2. 原點復歸 (Find Reference)
執行自動尋原點程序。
| 參數 | 說明 |
|---|---|
| Target Mode | 選擇參考點類型:Home, Forward Limit, Reverse Limit, 或 Index。 |
| Search Direction | 設定初次搜尋的方向。 |
| Velocity Profile | 設定搜尋速度、加速度及接近速度 (Approach Velocity)。 |
| Offset Position | 尋獲原點後的偏移移動量。 |
| Reset Position | 尋獲後是否將位置歸零。 |
| Find / Stop | 執行或停止尋原點動作。 |
| State | 顯示目前狀態:Idle (閒置), Finding (搜尋中), Found (已尋獲)。 |