STEM
Device pinout
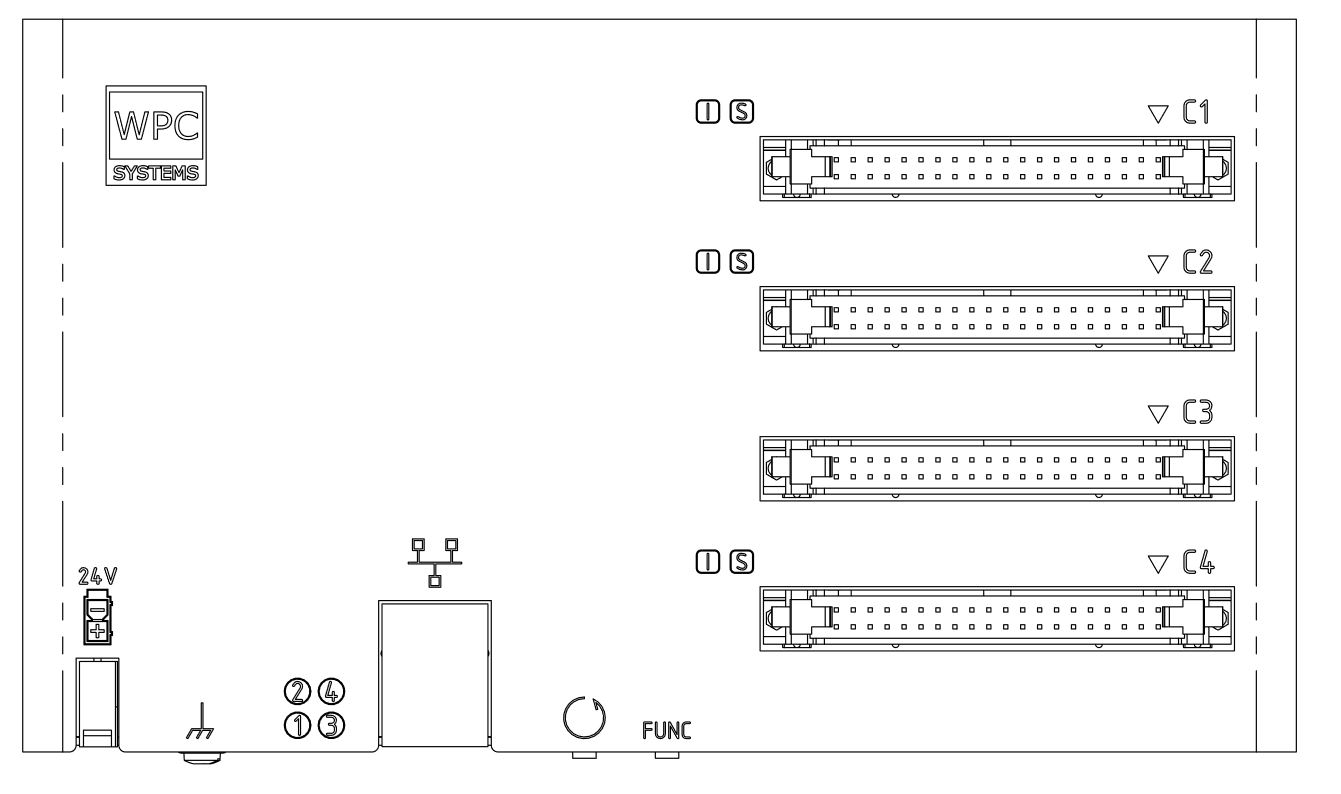
API function description
- class pywpc.STEM
10/100 T-based Ethernet interface
4-slot IDC-50P 3.3V DIO
Support modules: 24ch-24V-DI/ 24ch-24V-DO/ 12-12ch-24V-DIO/ 24ch-5V-TTL/ 24ch-AIO
24ch-2-wire-Multiplexer/4x6-Matrix switch
- AI_close(port, timeout=3)
Close AI module on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- AI_closeStreaming(port, timeout=3)
Close AI streaming acquisition on a given port. This parameter is only effective for the “N-samples” and “continuous” modes.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_closeStreaming_async(port)
Close AI streaming acquisition on a given port with async mode. This parameter is only effective for the “N-samples” and “continuous” modes.
- async AI_close_async(port)
Close AI module on a given port with async mode.
- AI_enableCS(slot, chip_select=[0], timeout=3)
Set AI chip selection on a given slot. This API is only effective for STEM.
- Parameters
- slotint
Slot number. See here for available ports of different WPC devices.
- chip_selectlist
Chip-number
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_enableCS_async(slot, chip_select=[0])
Set AI chip selection on a given slot with async mode. This API is only effective for STEM.
- Parameters
- slotint
Slot number. See here for available ports of different WPC devices.
- chip_selectlist
Chip-number. The default chip number is 0.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- AI_enableChannel(port, channel, timeout=3)
Set AI channel on a given port. This API is only effective for USBDAQF1AD and USBDAQF1AOD.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- channelint
The number of channels that you want to enable. If this parameter is set to 4, it means the AI channel is open from channel 0 to 3.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_enableChannel_async(port, channel)
Set AI channel on a given port with async mode. This API is only effective for USBDAQF1AD and USBDAQF1AOD.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- channelint
The number of channels that you want to enable. If this parameter is set to 4, it means the AI channel is open from channel 0 to 3.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- AI_open(port, timeout=3)
Open AI module on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- AI_openStreaming(port, timeout=3)
Open streaming acquisition on a given port. This parameter is only effective for the “N-samples” and “continuous” modes.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_openStreaming_async(port)
Open streaming acquisition on a given port with async mode. This parameter is only effective for the “N-samples” and “continuous” modes.
- async AI_open_async(port)
Open AI module on a given port with async mode.
- AI_readOnDemand(port, timeout=3)
Read one sample from a given port. This should only be used in the “on demand” mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- samplelist of float
List of AI values in volt that are measured on enabled channels.
- async AI_readOnDemand_async(port)
Read one sample from a given port with async mode. This should only be used in the “on demand” mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- Returns
- samplelist of float
List of AI values in volt that are measured on enabled channels.
- AI_readStreaming(port, num_samples, delay=0.005)
Read AI streaming samples from a given port.
After streaming starts, data are acquired by the DAQ with the rate indicated by configuration. The data are then streamed to the PC and are stocked in a queue in the WPC device handle. Users should call this function to retrieve them from the queue.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- num_samplesint
Number of samples to get out from the queue. A sample is a list of values measured simultaneously from different channels. If there are fewer samples than the expected number, the function will return all available ones after
delayseconds expire.- delayfloat
Time in seconds to wait for the indicated amount of data to arrive. This becomes ineffective if there are already num_samples samples in the queue.
- Returns
- sample_listlist of list of float
AI data in volt. Each element of
sample_listis a sample. A sample is a list of values measured simultaneously from different channels. For eachi,len(sample_list[i])should be equal to the number of enabled channels.
- async AI_readStreaming_async(port, num_samples, delay=0.005)
Read AI streaming samples from a given port with async mode.
After streaming starts, data are acquired by the DAQ with the rate indicated by configuration. The data are then streamed to the PC and are stocked in a queue in the WPC device handle. Users should call this function to retrieve them from the queue.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- num_samplesint
Number of samples to get out from the queue. A sample is a list of values measured simultaneously from different channels. If there are fewer samples than the expected number, the function will return all available ones after
delayseconds expire.- delayfloat
Time in seconds to wait for the indicated amount of data to arrive. This becomes ineffective if there are already num_samples samples in the queue.
- Returns
- sample_listlist of list of float
AI data in volt. Each element of
sample_listis a sample. A sample is a list of values measured simultaneously from different channels. For eachi,len(sample_list[i])should be equal to the number of enabled channels.
- AI_setMode(port, mode, timeout=3)
Set AI acquisition mode on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- modeint
Acquisition mode. 0: on demand, 1: N-samples, 2: continuous.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_setMode_async(port, mode)
Set AI acquisition mode on a given port with async mode.
- AI_setNumSamples(port, num_samples, timeout=3)
Set number of AI samples to acquire on a given port. This parameter is only effective for the “N-samples” mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- num_samplesint
Number of samples. A sample is a list of values measured simultaneously from different channels. If N channels have been enabled, then a sample is made of N values.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_setNumSamples_async(port, num_samples)
Set number of AI samples to acquire on a given port with async mode. This parameter is only effective for the “N-samples” mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- num_samplesint
Number of samples. A sample is a list of values measured simultaneously from different channels. If N channels have been enabled, then a sample is made of N values.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- AI_setSamplingRate(port, sampling_rate, timeout=3)
Set AI sampling rate on a given port. This parameter is only effective for the “N-samples” and “continuous” modes.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- sampling_ratefloat
Sampling rate in Hz.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_setSamplingRate_async(port, sampling_rate)
Set AI sampling rate on a given port with async mode. This parameter is only effective for the “N-samples” and “continuous” modes.
- AI_setTriggerMode(port, mode, timeout=3)
Set AI trigger mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- modeint
0: Use CMD to start AI streaming 1: Use RTC to start AI streaming 2: Use EXTI to start AI streaming 3: Use CMD & RTC to start AI streaming 4: Use CMD & EXTI to start AI streaming 5: Use RTC & EXTI to start AI streaming 6: Use CMD & RTC & EXTI to start AI streaming
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_setTriggerMode_async(port, mode)
Set AI trigger mode with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- modeint
0: Use CMD to start AI streaming 1: Use RTC to start AI streaming 2: Use EXTI to start AI streaming 3: Use CMD & RTC to start AI streaming 4: Use CMD & EXTI to start AI streaming 5: Use RTC & EXTI to start AI streaming 6: Use CMD & RTC & EXTI to start AI streaming
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- AI_startStreaming(port, timeout=3)
Start streaming acquisition on a given port. This parameter is only effective for the “N-samples” and “continuous” modes.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AI_startStreaming_async(port)
Start streaming acquisition on a given port with async mode. This parameter is only effective for the “N-samples” and “continuous” modes.
- AO_close(port, timeout=3)
Close AO module on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AO_close_async(port)
Close AO module on a given port with async mode.
- AO_getPort()
Get AO port number(s).
- Parameters
- None
- Returns
- portlist
Available AO port(s) from the device.
- AO_open(port, timeout=3)
Open AO module on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AO_open_async(port)
Open AO module on a given port with async mode.
- AO_writeAllChannels(port, value_list, timeout=3)
Write voltages to all channels on a given port. This should only be used in the “on demand” mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- value_listlist of float
The list of voltages in volts.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AO_writeAllChannels_async(port, value_list)
Write voltages to all channels on a given port with async mode. This should only be used in the “on demand” mode.
- AO_writeOneChannel(port, channel, value, timeout=3)
Write voltage to the specific channel. This should only be used in the “on demand” mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- channelint
Channel number.
- valuefloat
Voltage in volts.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async AO_writeOneChannel_async(port, channel, value)
Write voltage to the specific channel with async mode. This should only be used in the “on demand” mode.
- DIO_loadStartup(port, timeout=3)
Load DIO values from EEPROM.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- enable_list
Get status about pin enable.
0: disable, 1: enable
- direction_list
Get status about pin direction.
0: input, 1: output
- state_list
Get status about pin state.
- async DIO_loadStartup_async(port)
Load DIO values from EEPROM with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- enable_list
Get status about pin enable.
0: disable, 1: enable
- direction_list
Get status about pin direction.
0: input, 1: output
- state_list
Get status about pin state.
- DI_closePins(port, pin, timeout=3)
Close the specific pin to digital intput.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DI_closePins_async(port, pin)
Close the specific pin to digital intput with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DI_closePort(port, timeout=3)
Close all pins in the specific port to digital input.
- async DI_closePort_async(port)
Close all pins in the specific port to digital input with async mode.
- DI_getPinMap()
Get all available DI port numbers & the pins that are associated with them.
- Returns
- Pinmapdictionary
Each key is an available port. Its associated value yields the corresponding pins of that port.
Each pin is an integer representing its number.
For example: {0: [0, 1, 2, 3, 4, 5, 6, 7], 1: [0, 1, 2, 3, 4, 5]} means that there are two DI ports.
They are numbered as 0 & 1. Port 0 has 8 pins: P0.0 to P0.7. Port 1 has 6 pins: P1.0 to P1.5.
General format: {DI_port: [pin, …, pin]}.
- DI_openPins(port, pin, timeout=3)
Open the specific pin to digital intput.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DI_openPins_async(port, pin)
Open the specific pin to digital intput with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DI_openPort(port, timeout=3)
Open all pins in the specific port to digital input.
- async DI_openPort_async(port)
Open all pins in the specific port to digital input with async mode.
- DI_readPins(port, pin, timeout=3)
Read the specefic pin state.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
Get status about pin state.
- async DI_readPins_async(port, pin)
Read the specefic pin state with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statelist
Get status about pin state.
- DI_readPort(port, timeout=3)
Read all pins state in the specific port.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
Get status about pin state.
- async DI_readPort_async(port)
Read all pins state in the specific port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- statelist
Get status about pin state.
- DO_closePins(port, pin, timeout=3)
Close the specific pin to digital output.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_closePins_async(port, pin)
Close the specific pin to digital output with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinlist
Pin number you want to close.
For example, you want to close pin 0, pin 1 and pin 5.
pin [0,1,5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DO_closePort(port, timeout=3)
Close all pins in the specific port with digital output.
- async DO_closePort_async(port)
Close all pins in the specific port with digital output with async mode.
- DO_getPinMap()
Get all available DO port numbers & the pins that are associated with them.
- Returns
- Pinmapdictionary
Each key is an available port. Its associated value yields the corresponding pins of that port.
Each pin is an integer representing its number.
For example: {0: [0, 1, 2, 3, 4, 5, 6, 7], 1: [0, 1, 2, 3, 4, 5]} means that there are two DO ports.
They are numbered as 0 & 1. Port 0 has 8 pins: P0.0 to P0.7. Port 1 has 6 pins: P1.0 to P1.5.
General format: {DO_port: [pin, …, pin]}.
- DO_openPins(port, pin, timeout=3)
Open the specific pin to digital output.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_openPins_async(port, pin)
Open the specific pin to digital output with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set to digital output.
For example, you want to set pin 0, pin 1 and pin 5.
pin [0, 1, 5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DO_openPort(port, timeout=3)
Open all pins in the specific port to digital output.
- async DO_openPort_async(port)
Open all pins in the specific port to digital output with async mode.
- DO_togglePins(port, pin, timeout=3)
Toggle the specific pin.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
The list of pins state.
- async DO_togglePins_async(port, pin)
Toggle the specific pin with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statelist
The list of pins state.
- DO_togglePort(port, timeout=3)
Toggle all pins in the specific port.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
The list of pins state.
- async DO_togglePort_async(port)
Toggle all pins in the specific port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- statelist
The list of pins state.
- DO_writePins(port, pin, value, timeout=3)
Write high or low value to the specific pin.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set.
For example, you want to set pin 0, pin 1 and pin 5.
pin = [0, 1, 5].
- valueint or list
Pin number you want to set high or low.
High = 1, Low = 0.
For example, set pin 0 and pin 1 to high, and pin 5 to low.
value = [1, 1, 0].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_writePins_async(port, pin, value)
Write high or low value to the specific pin with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set.
For example, you want to set pin 0, pin 1 and pin 5.
pin = [0, 1, 5].
- valueint or list
Pin number you want to set high or low.
High = 1, Low = 0.
For example, set pin 0 and pin 1 to high, and pin 5 to low.
value = [1, 1, 0].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DO_writePort(port, value, timeout=3)
Write high or low value to all pins in the specefic port.
- Parameters
- portint
See here for available ports of different WPC devices.
- valueint or list
Pin number you want to set digital high or low.
High = 1, Low = 0.
For example if intput type is list
you want to write pin 0 and pin 2 to high, others to low.
[1, 0, 1, 0, 0, 0, 0, 0] in LSB.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_writePort_async(port, value)
Write high or low value to all pins in the specefic port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- valueint or list
Pin number you want to set digital high or low.
High = 1, Low = 0.
For example if intput type is list
you want to write pin 0 and pin 2 to high, others to low.
[1, 0, 1, 0, 0, 0, 0 ,0] in LSB.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_openFile(filename, clear_old=True, verbose=True)
Open CSV file.
- Parameters
- filenamestr
The file name.
- clear_oldbool, default: True
Whether to clear old data (if the file alread exists) or not.
- verbosebool, default: True
Whether to print message out.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_write2DList(value_mat)
Write list of list into file.
- Parameters
- value_matlist of list
The list of list of data to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_writeHeader(header)
Write header into file.
- Parameters
- headerlist of str
Header to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_writeList(value_list)
Write list into file.
- Parameters
- value_listlist
The list of data to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_writeValue(value)
Write value into file.
- Parameters
- valueobject
The data to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfg2AxisLinearInterpo(port, axis1, dest_posi1, axis2, dest_posi2, speed=10000, accel=100000, decel=100000, timeout=3)
Configure two axis linear interpolation parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis1{0, 1, 2, 3}
Axis1.
- dest_posi1int
Destination of axis1.
- axis2{0, 1, 2, 3}
Axis2.
- dest_posi2int
Destination of axis2.
- speedint
Speed vector of linear interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfg2AxisLinearInterpo_async(port, axis1, dest_posi1, axis2, dest_posi2, speed=10000, accel=100000, decel=100000)
Configure two axis linear interpolation parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis1{0, 1, 2, 3}
Axis1.
- dest_posi1int
Destination of axis1.
- axis2{0, 1, 2, 3}
Axis2.
- dest_posi2int
Destination of axis2.
- speedint
Speed vector of linear interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfg3AxisLinearInterpo(port, axis1, dest_posi1, axis2, dest_posi2, axis3, dest_posi3, speed=10000, accel=100000, decel=100000, timeout=3)
Configure three axis linear interpolation parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis1{0, 1, 2, 3}
Axis1.
- dest_posi1int
Destination of axis1.
- axis2{0, 1, 2, 3}
Axis2.
- dest_posi2int
Destination of axis2.
- axis3{0, 1, 2, 3}
Axis3.
- dest_posi3int
Destination of axis3.
- speedint
Speed vector of linear interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfg3AxisLinearInterpo_async(port, axis1, dest_posi1, axis2, dest_posi2, axis3, dest_posi3, speed=10000, accel=100000, decel=100000)
Configure three axis linear interpolation parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis1{0, 1, 2, 3}
Axis1.
- dest_posi1int
Destination of axis1.
- axis2{0, 1, 2, 3}
Axis2.
- dest_posi2int
Destination of axis2.
- axis3{0, 1, 2, 3}
Axis3.
- dest_posi3int
Destination of axis3.
- speedint
Speed vector of linear interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfg4AxisLinearInterpo(port, axis1, dest_posi1, axis2, dest_posi2, axis3, dest_posi3, axis4, dest_posi4, speed, accel=100000, decel=100000, timeout=3)
Configure four axis linear interpolation parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis1{0, 1, 2, 3}
Axis1.
- dest_posi1int
Destination of axis1.
- axis2{0, 1, 2, 3}
Axis2.
- dest_posi2int
Destination of axis2.
- axis3{0, 1, 2, 3}
Axis3.
- dest_posi3int
Destination of axis3.
- axis4{0, 1, 2, 3}
Axis3.
- dest_posi4int
Destination of axis4.
- speedint
Speed vector of linear interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfg4AxisLinearInterpo_async(port, axis1, dest_posi1, axis2, dest_posi2, axis3, dest_posi3, axis4, dest_posi4, speed, accel=100000, decel=100000)
Configure four axis linear interpolation parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis1{0, 1, 2, 3}
Axis1.
- dest_posi1int
Destination of axis1.
- axis2{0, 1, 2, 3}
Axis2.
- dest_posi2int
Destination of axis2.
- axis3{0, 1, 2, 3}
Axis3.
- dest_posi3int
Destination of axis3.
- axis4{0, 1, 2, 3}
Axis3.
- dest_posi4int
Destination of axis4.
- speedint
Speed vector of linear interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgAlarm(port, axis, en_alarm, alarm_polarity, timeout=3)
Configure alarm parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_alarm{0, 1}
Enable alarm inputs. 0: False, 1: True.
- alarm_polarity{0, 1}
Set the polarity for alarm. 0: Active Low, 1: Active High.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgAlarm_async(port, axis, en_alarm, alarm_polarity)
Configure alarm parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_alarm{0, 1}
Enable alarm inputs. 0: False, 1: True.
- alarm_polarity{0, 1}
Set the polarity for alarm. 0: Active Low, 1: Active High.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgAxis(port, axis, stepper_output, axis_dir, encoder_dir, servo_on_polarity, timeout=3)
Configure axis parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- stepper_output{0, 1}
It specifies the mode as Step and Direction (one pulse) or Clockwise/Counterclockwise.(two pulse) 0: Step/Dir(One Pulse), 1: CW/CCW(Two Pulse).
- axis_dir{0, 1}
Set axis direction to CW or CCW. 0: CW, 1: CCW.
- encoder_dir{0, 1}
Set encoder direction to CW or CCW. 0: CW, 1: CCW.
- servo_on_polarity{0, 1}
Set the polarity for servo on. 0: Active Low, 1: Active High.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgAxisMove(port, axis, mode, target_posi=0, velo=10000, accel=100000, decel=100000, timeout=3)
Configure motion operation mode, target position, velocity, acceleration and deceleration of a single axis move.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- mode{0, 1, 2}
Operation mode. 0: Absolute mode, 1: Relative mode, 2: Velocity mode.
- target_posiint
Target position in counts or steps.
- veloint
Velocity in counts/s or steps/s.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgAxisMove_async(port, axis, mode, target_posi=0, velo=10000, accel=100000, decel=100000)
Configure motion operation mode, target position, velocity, acceleration and deceleration of a single axis move with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- mode{0, 1, 2}
Operation mode. 0: Absolute mode, 1: Relative mode, 2: Velocity mode.
- target_posiint
Target position in counts or steps.
- veloint
Velocity in counts/s or steps/s.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgAxis_async(port, axis, stepper_output, axis_dir, encoder_dir, servo_on_polarity)
Configure axis parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- stepper_output{0, 1}
It specifies the mode as Step and Direction (one pulse) or Clockwise/Counterclockwise.(two pulse) 0: Step/Dir(One Pulse), 1: CW/CCW(Two Pulse).
- axis_dir{0, 1}
Set axis direction to CW or CCW. 0: CW, 1: CCW.
- encoder_dir{0, 1}
Set encoder direction to CW or CCW. 0: CW, 1: CCW.
- servo_on_polarity{0, 1}
Set the polarity for servo on. 0: Active Low, 1: Active High.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgBreakPoint(port, axis, mode, breakpoint_polarity, start_posi, pulse_width, pulse_period, pulse_number, timeout=3)
Configure breakpoint parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- mode{0, 1}
0: Absolute position, 1: Relative position.
- breakpoint_polarity{0, 1}
Set the polarity for breakpoint. 0: Active Low, 1: Active High.
- start_posiint
The start position.
- pulse_widthint
The pulse width.
- pulse_periodint
The pulse period.
- pulse_numberint
The pulse period.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgBreakPoint_async(port, axis, mode, breakpoint_polarity, start_posi, pulse_width, pulse_period, pulse_number)
Configure breakpoint parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- mode{0, 1}
0: Absolute position, 1: Relative position.
- breakpoint_polarity{0, 1}
Set the polarity for breakpoint. 0: Active Low, 1: Active High.
- start_posiint
The start position.
- pulse_widthint
The pulse width.
- pulse_periodint
The pulse period.
- pulse_numberint
The pulse period.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgCapture(port, axis, capture_type, mode, timeout=3)
Configure capture parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- capture_type{0, 1}
0: Rising edge, 1: Falling edge.
- mode{0, 1}
0: Logical position, 1: Encoder position.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgCapture_async(port, axis, capture_type, mode)
Configure capture parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- capture_type{0, 1}
0: Rising edge, 1: Falling edge.
- mode{0, 1}
0: Logical position, 1: Encoder position.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgCircularInterpo(port, x_axis, y_axis, center_point_x, center_point_y, finish_point_x, finish_point_y, dir, speed=10000, accel=100000, decel=100000, timeout=3)
Configure circular interpolation parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- x_axis{0, 1, 2, 3}
x_axis.
- y_axis{0, 1, 2, 3}
y_axis.
- center_point_xint
Set the center point of x by the relative value with respect to the current position.
- center_point_yint
Set the center point of y by the relative value with respect to the current position.
- finish_point_xint
Set the finish point of x by the relative value with respect to the current position.
- finish_point_yint
Set the finish point of y by the relative value with respect to the current position.
- dir{0, 1}
Set circular direction to CW or CCW. 0: CW, 1: CCW.
- speedint
Speed vector of circular interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgCircularInterpo_async(port, x_axis, y_axis, center_point_x, center_point_y, finish_point_x, finish_point_y, dir, speed=10000, accel=100000, decel=100000)
Configure circular interpolation parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- x_axis{0, 1, 2, 3}
x_axis.
- y_axis{0, 1, 2, 3}
y_axis.
- center_point_xint
Set the center point of x by the relative value with respect to the current position.
- center_point_yint
Set the center point of y by the relative value with respect to the current position.
- finish_point_xint
Set the finish point of x by the relative value with respect to the current position.
- finish_point_yint
Set the finish point of y by the relative value with respect to the current position.
- dir{0, 1}
Set circular direction to CW or CCW. 0: CW, 1: CCW.
- speedint
Speed vector of circular interpolation.
- accelint
Acceleration value in counts/s2 or steps/s2.
- decelint
Deceleration value in counts/s2 or steps/s2.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgEncoder(port, axis, encoder_z_polarity, timeout=3)
Configure encoder parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- encoder_z_polarity{0, 1}
Set the polarity for encoder Z. 0: Active Low, 1: Active High.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgEncoder_async(port, axis, encoder_z_polarity)
Configure encoder parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- encoder_z_polarity{0, 1}
Set the polarity for encoder Z. 0: Active Low, 1: Active High.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgFindRef(port, axis, search_type, search_dir, search_velo=10000, search_accle=100000, approach_velo_percent=20, en_reset_posi=0, offset_posi=0, timeout=3)
Configure find reference parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- search_type{0, 1, 2}
Reference position to find. 0: Home, 1: Index, 2: Limit.
- search_dirint
Set search direction to forward or reverse. 0: Forward, 1: Reverse.
- search_veloint
Set velocity in counts/s or steps/s.
- search_accleint
Set acceleration value in counts/s2 or steps/s2.
- approach_velo_percentint or float
The percent of the loaded velocity that a given axis uses to perform final adjustments.
- en_reset_posiint
If true, after successfully locating the given reference, it resets positions to values indicated by current position. If false, no reset is performed. 0: False, 1: True.
- offset_posiint
Performs an offset move of a given distance, in counts (steps), after successfully locating the given reference, but before resetting the position if a reset is requested.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgFindRef_async(port, axis, search_type, search_dir, search_velo=10000, search_accle=100000, approach_velo_percent=20, en_reset_posi=0, offset_posi=0)
Configure find reference parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- search_type{0, 1, 2}
Reference position to find. 0: Home, 1: Index, 2: Limit.
- search_dirint
Set search direction to forward or reverse. 0: Forward, 1: Reverse.
- search_veloint
Set velocity in counts/s or steps/s.
- search_accleint
Set acceleration value in counts/s2 or steps/s2.
- approach_velo_percentint or float
The percent of the loaded velocity that a given axis uses to perform final adjustments.
- en_reset_posiint
If true, after successfully locating the given reference, it resets positions to values indicated by current position. If false, no reset is performed. 0: False, 1: True.
- offset_posiint
Performs an offset move of a given distance, in counts (steps), after successfully locating the given reference, but before resetting the position if a reset is requested.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgHelicalInterpo(port, center_point_x, center_point_y, finish_point_x, finish_point_y, en_axis3, pitch_axis3, en_axis4, pitch_axis4, rotation_number, speed, dir, calculation_timeout, timeout=3)
Configure helical interpolation parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- center_point_xint
Set the center point of x by the relative value with respect to the current position.
- center_point_yint
Set the center point of y by the relative value with respect to the current position.
- finish_point_xint
Set the finish point of x by the relative value with respect to the current position.
- finish_point_yint
Set the finish point of y by the relative value with respect to the current position.
- en_axis3{0, 1}
0: False, 1: True.
- pitch_axis3int
The axis3 pitch.
- en_axis4{0, 1}
0: False, 1: True.
- pitch_axis4int
The axis4 pitch.
- rotation_numberint
- speedint
Speed vector of circular interpolation.
- dir{0, 1}
Set circular direction to CW or CCW. 0: CW, 1: CCW.
- calculation_timeoutint
Helical calculation timeout.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgHelicalInterpo_async(port, center_point_x, center_point_y, finish_point_x, finish_point_y, en_axis3, pitch_axis3, en_axis4, pitch_axis4, rotation_number, speed, dir, calculation_timeout)
Configure helical interpolation parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- center_point_xint
Set the center point of x by the relative value with respect to the current position.
- center_point_yint
Set the center point of y by the relative value with respect to the current position.
- finish_point_xint
Set the finish point of x by the relative value with respect to the current position.
- finish_point_yint
Set the finish point of y by the relative value with respect to the current position.
- en_axis3{0, 1}
0: False, 1: True.
- pitch_axis3int
The axis3 pitch.
- en_axis4{0, 1}
0: False, 1: True.
- pitch_axis4int
The axis4 pitch.
- rotation_numberint
- speedint
Speed vector of circular interpolation.
- dir{0, 1}
Set circular direction to CW or CCW. 0: CW, 1: CCW.
- calculation_timeoutint
Helical calculation timeout.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgHome(port, axis, en_home, home_polarity, timeout=3)
Configure home parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_home{0, 1}
enable home inputs. 0: False, 1: True.
- home_polarity{0, 1}
Set the polarity for home. 0: Active Low, 1: Active High.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgHome_async(port, axis, en_home, home_polarity)
Configure home parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_home{0, 1}
enable home inputs. 0: False, 1: True.
- home_polarity{0, 1}
Set the polarity for home. 0: Active Low, 1: Active High.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgInposi(port, axis, en_inposi, inposi_polarity, timeout=3)
Configure Inposition parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_inposi{0, 1}
Enable Inposition inputs. 0: False, 1: True.
- inposi_polarity{0, 1}
Set the polarity for inposition. 0: Active Low, 1: Active High.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgInposi_async(port, axis, en_inposi, inposi_polarity)
Configure Inposition parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_inposi{0, 1}
Enable Inposition inputs. 0: False, 1: True.
- inposi_polarity{0, 1}
Set the polarity for inposition. 0: Active Low, 1: Active High.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgJerkAndAccelMode(port, axis, jerk, accel_mode, timeout=3)
Configure jerk and acceleration parameters.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- jerkint
Accerleration increasing/ decreasing rate per unit time.
- acceleration_mode{0, 1}
Trapezoidal or S curve mode. 0: Trapezoidal, 1: S curve.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgJerkAndAccelMode_async(port, axis, jerk, accel_mode)
Configure jerk and acceleration parameters with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- jerkint
Accerleration increasing/ decreasing rate per unit time.
- acceleration_mode{0, 1}
Trapezoidal or S curve mode. 0: Trapezoidal, 1: S curve.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_cfgLimit(port, axis, en_forward, en_reverse, limit_polarity, timeout=3)
Configure limit enable and polarity.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_forward{0, 1}
Enable forward limit inputs. 0: False, 1: True.
- en_reverse{0, 1}
Enable reverse limit inputs. 0: False, 1: True.
- limit_polarity{0, 1}
Set the polarity for limit. 0: Active Low, 1: Active High.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_cfgLimit_async(port, axis, en_forward, en_reverse, limit_polarity)
Configure limit enable and polarity with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_forward{0, 1}
Enable forward limit inputs. 0: False, 1: True.
- en_reverse{0, 1}
Enable reverse limit inputs. 0: False, 1: True.
- limit_polarity{0, 1}
Set the polarity for limit. 0: Active Low, 1: Active High.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_checkRef(port, axis, timeout=3)
Check the status of a search sequence initiated by find reference.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
0 : finding reference 1 : found reference
- async Motion_checkRef_async(port, axis)
Check the status of a search sequence initiated by find reference with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
0 : finding reference 1 : found reference
- Motion_close(port, timeout=3)
Close motion module on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_close_async(port)
Close motion module on a given port with async mode.
- Motion_enableBreakPoint(port, axis, en_break, timeout=3)
Set the breakpoint singal of specific axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_break{0, 1}
Enable breakpoint. 0: False, 1: True.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_enableBreakPoint_async(port, axis, en_break)
Set the breakpoint singal of specific axis with async mode.
- Motion_enableCapture(port, axis, en_capture, timeout=3)
Set the capture singal of specific axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- en_capture{0, 1}
Enable capture. 0: False, 1: True.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_enableCapture_async(port, axis, en_capture)
Set the capture singal of specific axis with async mode.
- Motion_enableServoOff(port, axis, timeout=3)
Servo off singal of specific axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_enableServoOff_async(port, axis)
Servo off singal of specific axis with async mode.
- Motion_enableServoOn(port, axis, timeout=3)
Servo on singal of specific axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_enableServoOn_async(port, axis)
Servo on singal of specific axis with async mode.
- Motion_findRef(port, axis, timeout=3)
Execute a search operation to find a reference position.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_findRef_async(port, axis)
Execute a search operation to find a reference position with async mode.
- Motion_getEncoderPosi(port, axis, timeout=3)
Get emcoder position for an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
Encoder position of the axis.
- async Motion_getEncoderPosi_async(port, axis)
Get Encoder position for an axis with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
Encoder position of the axis.
- Motion_getHomeStatus(port, axis, timeout=3)
Read the instantaneous status of the home inputs.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Home input status.
- async Motion_getHomeStatus_async(port, axis)
Read the instantaneous status of the home inputs with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
Home input status.
- Motion_getLimitStatus(port, axis, timeout=3)
Read the instantaneous status of the hardware limit inputs.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statuslist
List int of the forward and reverse limit inputs status.
- async Motion_getLimitStatus_async(port, axis)
Read the instantaneous status of the hardware limit inputs with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statuslist
List int of the forward and reverse limit inputs status.
- Motion_getLogicalPosi(port, axis, timeout=3)
Get logical position for an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
Logical position of the axis.
- async Motion_getLogicalPosi_async(port, axis)
Get logical position for an axis with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
Logical position of the axis.
- Motion_getMoveStatus(port, axis, timeout=3)
Read the move complete status of an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
If return value is 1, move complete.
- async Motion_getMoveStatus_async(port, axis)
Read the move complete status of an axis with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
If return value is 1, move complete.
- Motion_loadCfgFile(timeout=3)
Load motion parameters from configuration file.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_loadCfgFile_async()
Load motion parameters from configuration file with async mode.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_open(port, timeout=3)
Open motion module on a given port.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_openCfgFile(filename='test.ini')
Open configuration file.
- Parameters
- filenamestr
The file name.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_openCfgFile_async(filename='test.ini')
Open configuration file with async mode.
- Parameters
- filenamestr
The file name.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_open_async(port)
Open motion module on a given port with async mode.
- Motion_overrideAxisAccel(port, axis, new_accel, new_decel, timeout=3)
Override instantaneous accerleration / deceleration for an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- new_accelint
Acceleration value in counts/s2 or steps/s2.
- new_decelint
Deceleration value in counts/s2 or steps/s2.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_overrideAxisAccel_async(port, axis, new_accel, new_decel)
Override instantaneous accerleration / deceleration for an axis with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- new_accelint
Acceleration value in counts/s2 or steps/s2.
- new_decelint
Deceleration value in counts/s2 or steps/s2.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_overrideAxisPosi(port, axis, new_position, timeout=3)
Override new position for an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- new_positionint
New position for an axis.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_overrideAxisPosi_async(port, axis, new_position)
Override new position for an axis with async mode.
- Motion_overrideAxisVelocity(port, axis, new_velo, timeout=3)
Override instantaneous velocity for an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- new_veloint
Velocity in counts/s or steps/s.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_overrideAxisVelocity_async(port, axis, new_velo)
Override instantaneous velocity for an axis with async mode.
- Motion_readCapturePoint(port, axis, timeout=3)
Read a captured position value from an axis or encoder.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Captured position value.
- async Motion_readCapturePoint_async(port, axis)
Read a captured position value from an axis or encoder with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- Returns
- statusint
Captured position value.
- Motion_rstEncoderPosi(port, axis, encoder_posi=0, timeout=3)
Reset the position of an encoder.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- encoder_posiint
Reset value for axis.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_rstEncoderPosi_async(port, axis, encoder_posi=0)
Reset the position of an encoder with async mode.
- Motion_saveCfgFile()
Save motion parameters into configuration file.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_saveCfgFile_async()
Save motion parameters into configuration file with async mode.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Motion_setLogicalPosi(port, axis, counter, timeout=3)
Set logical position for an axis.
- async Motion_setLogicalPosi_async(port, axis, counter)
Set logical position for an axis with async mode.
- Motion_startCircularInterpo(port, timeout=3)
Start circular interpolation.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_startCircularInterpo_async(port)
Start circular interpolation with async mode.
- Motion_startHelicalInterpo(port, timeout=3)
Start helical interpolation.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_startHelicalInterpo_async(port)
Start helical interpolation with async mode.
- Motion_startLinearInterpo(port, timeout=3)
Start linear interpolation.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_startLinearInterpo_async(port)
Start linear interpolation with async mode.
- Motion_startMultiAxisMove(port, axis_list, timeout=3)
Start motion of multiple axes.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis_listlist
The list of axis to select multi move.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_startMultiAxisMove_async(port, axis_list)
Start motion of multiple axes with async mode.
- Motion_startSingleAxisMove(port, axis, timeout=3)
Start motion of single axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_startSingleAxisMove_async(port, axis)
Start motion of single axis with async mode.
- Motion_stop(port, axis, mode, timeout=3)
Stop motion of an axis.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- mode{0, 1}
Mode of stop to execute. 0: deceleration, 1: halt.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Motion_stop_async(port, axis, mode)
Stop motion of an axis with async mode.
- Parameters
- portint
Port number. See here for available ports of different WPC devices.
- axis{0, 1, 2, 3}
Axis selector.
- mode{0, 1}
Mode of stop to execute. 0: deceleration, 1: halt.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Net_getGateway(timeout=3)
Get geteway from the connected web device.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- gatewaystr of 4 int separated by period.
Network gateway.
- async Net_getGateway_async()
Get geteway from the connected web device with async mode.
- Returns
- gatewaystr of 4 int separated by period.
Network gateway.
- Net_getIPAddrAndSubmask(timeout=3)
Get IP address and subnet mask from the connected web device.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- network_infolist of 2 str.
network_info[0]: IP addressnetwork_info[1]: subnet mask
- async Net_getIPAddrAndSubmask_async()
Get IP address and subnet mask from the connected web device with async mode.
- Returns
- network_infolist of 2 str.
network_info[0]: IP addressnetwork_info[1]: subnet mask
- Net_getMACAddr(timeout=3)
Get MAC address from the connected web device.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- mac_addrstr of 6 int separated by colon.
MAC address.
- async Net_getMACAddr_async()
Get MAC address from the connected web device with async mode.
- Returns
- mac_addrstr of 6 int separated by colon.
MAC address.
- Net_setIPAddrAndSubmask(ip_addr, subnet_mask='255.255.255.0', timeout=3)
Set IP address and subnet mask to the connected web device.
- Parameters
- ip_addrstr of 4 int separated by period.
IP network address.
- subnet_maskstr of 4 int separated by period.
Subnet mask. (default: “255.255.255.0”)
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Net_setIPAddrAndSubmask_async(ip_addr, subnet_mask='255.255.255.0')
Set IP address and subnet mask to the connected web device with async mode.
- Parameters
- ip_addrstr of 4 int separated by period.
IP network address.
- subnet_maskstr of 4 int separated by period.
Subnet mask. (default: “255.255.255.0”)
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_getDeviceAlias(timeout=3)
Get device alias name.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- Alias namestring
The alias name of the device.
- async Sys_getDeviceAlias_async()
Get device alias name with async mode.
- Returns
- Alias namestring
The alias name of the device.
- Sys_getDriverInfo(timeout=3)
Get device firmware information.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- driver_infolist of three string
driver_info[0]: Model name.driver_info[1]: Mode.driver_info[2]: Firmware version.
- async Sys_getDriverInfo_async()
Get device firmware information with async mode.
- Returns
- driver_infolist of three string
driver_info[0]: Model name.driver_info[1]: Mode.driver_info[2]: Firmware version.
- Sys_getGateway(timeout=3)
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_getGateway.
- async Sys_getGateway_async()
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_getGateway_async.
- Sys_getIPAddrAndSubmask(timeout=3)
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_getIPAddrAndSubmask.
- async Sys_getIPAddrAndSubmask_async()
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_getIPAddrAndSubmask_async.
- Sys_getMACAddr(timeout=3)
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_getMACAddr.
- async Sys_getMACAddr_async()
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_getMACAddr_async.
- Sys_getMode(slot, timeout=3)
Get the mode from a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- str_str
Mode of slot.
- async Sys_getMode_async(slot)
Get the mode from a given slot with async mode.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- Returns
- str_str
Mode of slot.
- Sys_getPinModeInPort(port, timeout=3)
Get pin mode in specific port.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- pinsint
How many pins in specific port.
- pin_modelist of 8 string
[pin0, pin1,……pin7]
pinmode : Disabled, Idle, DI, DO, UART, I2C, SPI, CAN, PWM and ADC.
- async Sys_getPinModeInPort_async(port)
Get pin mode in specific port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- pinsint
How many pins in specific port.
- pin_modelist of 8 string
[pin0, pin1,……pin7]
pinmode : Disabled, Idle, DI, DO, UART, I2C, SPI, CAN, PWM and ADC.
- Sys_getPythonVersion(timeout=3)
Get python software version.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- versionstring
- async Sys_getPythonVersion_async()
Get python software version with async mode.
- Returns
- versionstring
- Sys_getRTC(timeout=3)
Get RTC date and time.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- str_str
- Date and time represented by “A-B-C, D:E:F”.
“A” is year.
“B” is month.
“C” is day.
“D” is hour.
“E” is minute.
“F” is second.
- async Sys_getRTC_async()
Get RTC date and time with async mode.
- Returns
- str_str
- Date and time represented by “A-B-C, D:E:F”.
“A” is year.
“B” is month.
“C” is day.
“D” is hour.
“E” is minute.
“F” is second.
- Sys_getSerialNumber(timeout=3)
Get serial number.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- str_str
Serial number represented by string of 8 characters.
- async Sys_getSerialNumber_async()
Get serial number with async mode.
- Returns
- str_str
Serial number represented by string of 8 characters.
- Sys_reboot(timeout=3)
Reboot the device.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_reboot_async()
Reboot the device with async mode.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_setAIOMode(slot, timeout=3)
Set the AIO state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setAIOMode_async(slot)
Set the AIO state on a given slot with async mode.
- Sys_setDIMode(slot, timeout=3)
Set the DI state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDIMode_async(slot)
Set the DI state on a given slot with async mode.
- Sys_setDIOMode(slot, timeout=3)
Set the DIO state for the slot in the connected WPC device.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDIOMode_async(slot)
Set the DIO state for the slot in the connected WPC device with async mode.
- Sys_setDOMode(slot, timeout=3)
Set the DO state for the slot in the connected WPC device.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDOMode_async(slot)
Set the DO state for the slot in the connected WPC device with async mode.
- Sys_setDeviceAlias(alias, timeout=3)
Set the alias name of the device.
- Parameters
- aliasstr
The alias name of the device
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDeviceAlias_async(alias)
Set the alias name of the device.
- Parameters
- aliasstr
The alias name of the device
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_setIPAddrAndSubmask(ip_addr, subnet_mask='255.255.255.0', timeout=3)
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_setIPAddrAndSubmask.
- async Sys_setIPAddrAndSubmask_async(ip_addr, subnet_mask='255.255.255.0')
Deprecated in v1.0.5. Will be removed in v1.2.0.
See :ref:
Net_setIPAddrAndSubmask_async.
- Sys_setIdleMode(slot, timeout=3)
Set the IDLE state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setIdleMode_async(slot)
Set the IDLE state on a given slot with async mode.
- Sys_setMotionMode(slot, timeout=3)
Set the motion state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setMotionMode_async(slot)
Set the motion state on a given slot with async mode.
- Sys_setRTC(year, month, day, hour, minute, second, timeout=3)
Set RTC date and time.
- Parameters
- yearint
year (CE).
- monthint
month (1~12).
- dayint
day (1~31).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setRTC_async(year, month, day, hour, minute, second)
Set RTC date and time with async mode.
- Parameters
- yearint
year (CE).
- monthint
month (1~12).
- dayint
day (1~31).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_setSwitchMode(slot, timeout=3)
Set the switch state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setSwitchMode_async(slot)
Set the switch state on a given slot with async mode.
- Sys_startRTCAlarm(mode, day, hour, minute, second, timeout=3)
Start RTC time to alarm AI.
- Parameters
- modeint
0: Day value interpreted as calendar day. 1: Day value interpreted as weekday.
- dayint
Celendar day (1~31)/ Weekday (1~7).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_startRTCAlarm_async(mode, day, hour, minute, second)
Start RTC time to alarm AI with async mode.
- Parameters
- modeint
0: Day value interpreted as calendar day. 1: Day value interpreted as weekday.
- dayint
Celendar day (1~31)/ Weekday (1~7).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_stopRTCAlarm(timeout=3)
Stop alarming.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_stopRTCAlarm_async()
Stop alarming with async mode.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- close()
Close web device handle.
- Parameters
- verbose: bool, default: True
Whether to print out messages or not.
- Returns
- None
- connect(ip_addr='192.168.1.110', port=7, verbose=True)
Connect handle to web device.
- Parameters
- ip_addrstr of 4 int separated by period.
IP network address of the WPC device to connect to.
- portint, default: 7
TCP port.
- verbose: bool, default: True
Whether to print out messages or not.
- Returns
- None
- disconnect(verbose=True)
Disconnect handle from web device.
- Parameters
- verbose: bool, default: True
Whether to print out messages or not.
- Returns
- None