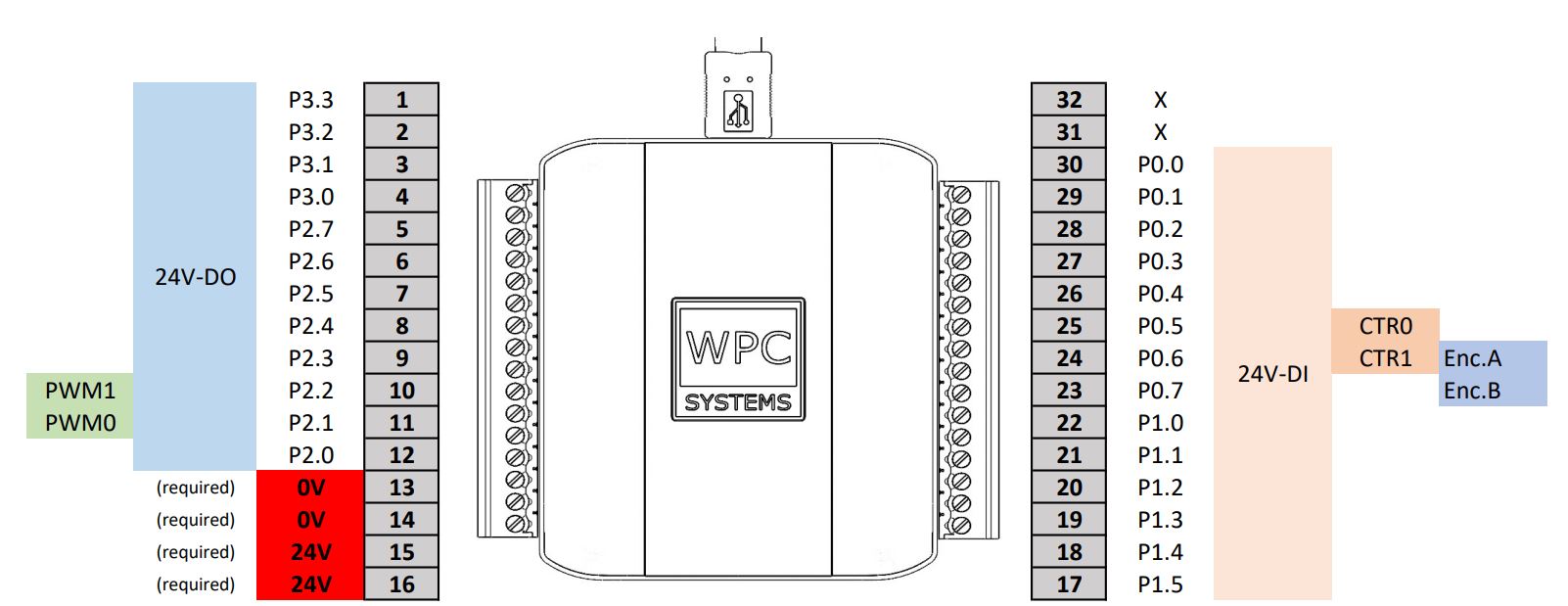
USB-DAQ-F1-D-SNK
Device pinout
API function description
- class pywpc.USBDAQF1DSNK
24V digital I/O
Digital output: 12ch NPN, opto-isolated 24V
Digital input: 14ch NPN, opto-isolated 24V
PWM/pulse counter/encoder counter
External 24VDC power required
USB 2.0 full-speed bus powered
- Counter_close(channel, timeout=3)
Close counting on the specific channel.
- async Counter_close_async(channel)
Close counting on the specific channel with async mode.
- Counter_open(channel, timeout=3)
Open counter on the specific channel.
- async Counter_open_async(channel)
Open counter on the specific channel with async mode.
- Counter_readFrequency(channel, timeout=3)
Read the value of counter frequency on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- frequencyfloat
Counter frequency.
- async Counter_readFrequency_async(channel)
Read the value of counter frequency on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- Returns
- frequencyfloat
Counter frequency.
- Counter_readPosition(channel, timeout=3)
Read the value of counter position on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- positionuint64
Counter position.
- async Counter_readPosition_async(channel)
Read the value of counter position on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- Returns
- positionuint64
Counter position.
- Counter_setEdge(channel, edge, timeout=3)
Set counter edge on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- edgeint
0: Falling edge. 1: Rising edge.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Counter_setEdge_async(channel, edge)
Set counter edge on the specific channel with async mode.
- Counter_setFreqWindow(channel, window_size, timeout=3)
Set moving window size on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- window_sizefloat
Moving window size. Default value is 100ms, and the minimum value is 20 ms.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Counter_setFreqWindow_async(channel, window_size)
Set moving window size on the specific channel with async mode.
- Counter_setPosition(channel, position, timeout=3)
Set counter position on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- positionuint 64
The counter position.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Counter_setPosition_async(channel, position)
Set counter position on the specific channel with async mode.
- Counter_start(channel, timeout=3)
Start counting on the specific channel.
- async Counter_start_async(channel)
Start counting on the specific channel with async mode.
- Counter_stop(channel, timeout=3)
Stop counting on the specific channel.
- async Counter_stop_async(channel)
Stop counting on the specific channel with async mode.
- DIO_loadStartup(port, timeout=3)
Load DIO values from EEPROM.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- enable_list
Get status about pin enable.
0: disable, 1: enable
- direction_list
Get status about pin direction.
0: input, 1: output
- state_list
Get status about pin state.
- async DIO_loadStartup_async(port)
Load DIO values from EEPROM with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- enable_list
Get status about pin enable.
0: disable, 1: enable
- direction_list
Get status about pin direction.
0: input, 1: output
- state_list
Get status about pin state.
- DI_closePins(port, pin, timeout=3)
Close the specific pin to digital intput.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DI_closePins_async(port, pin)
Close the specific pin to digital intput with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DI_closePort(port, timeout=3)
Close all pins in the specific port to digital input.
- async DI_closePort_async(port)
Close all pins in the specific port to digital input with async mode.
- DI_getPinMap()
Get all available DI port numbers & the pins that are associated with them.
- Returns
- Pinmapdictionary
Each key is an available port. Its associated value yields the corresponding pins of that port.
Each pin is an integer representing its number.
For example: {0: [0, 1, 2, 3, 4, 5, 6, 7], 1: [0, 1, 2, 3, 4, 5]} means that there are two DI ports.
They are numbered as 0 & 1. Port 0 has 8 pins: P0.0 to P0.7. Port 1 has 6 pins: P1.0 to P1.5.
General format: {DI_port: [pin, …, pin]}.
- DI_openPins(port, pin, timeout=3)
Open the specific pin to digital intput.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DI_openPins_async(port, pin)
Open the specific pin to digital intput with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DI_openPort(port, timeout=3)
Open all pins in the specific port to digital input.
- async DI_openPort_async(port)
Open all pins in the specific port to digital input with async mode.
- DI_readPins(port, pin, timeout=3)
Read the specefic pin state.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
Get status about pin state.
- async DI_readPins_async(port, pin)
Read the specefic pin state with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statelist
Get status about pin state.
- DI_readPort(port, timeout=3)
Read all pins state in the specific port.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
Get status about pin state.
- async DI_readPort_async(port)
Read all pins state in the specific port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- statelist
Get status about pin state.
- DO_closePins(port, pin, timeout=3)
Close the specific pin to digital output.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_closePins_async(port, pin)
Close the specific pin to digital output with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinlist
Pin number you want to close.
For example, you want to close pin 0, pin 1 and pin 5.
pin [0,1,5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DO_closePort(port, timeout=3)
Close all pins in the specific port with digital output.
- async DO_closePort_async(port)
Close all pins in the specific port with digital output with async mode.
- DO_getPinMap()
Get all available DO port numbers & the pins that are associated with them.
- Returns
- Pinmapdictionary
Each key is an available port. Its associated value yields the corresponding pins of that port.
Each pin is an integer representing its number.
For example: {0: [0, 1, 2, 3, 4, 5, 6, 7], 1: [0, 1, 2, 3, 4, 5]} means that there are two DO ports.
They are numbered as 0 & 1. Port 0 has 8 pins: P0.0 to P0.7. Port 1 has 6 pins: P1.0 to P1.5.
General format: {DO_port: [pin, …, pin]}.
- DO_openPins(port, pin, timeout=3)
Open the specific pin to digital output.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_openPins_async(port, pin)
Open the specific pin to digital output with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set to digital output.
For example, you want to set pin 0, pin 1 and pin 5.
pin [0, 1, 5].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DO_openPort(port, timeout=3)
Open all pins in the specific port to digital output.
- async DO_openPort_async(port)
Open all pins in the specific port to digital output with async mode.
- DO_togglePins(port, pin, timeout=3)
Toggle the specific pin.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
The list of pins state.
- async DO_togglePins_async(port, pin)
Toggle the specific pin with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set. For example, you want to set pin 0, pin 1 and pin 5. pin_index will be [0, 1, 5].
- Returns
- statelist
The list of pins state.
- DO_togglePort(port, timeout=3)
Toggle all pins in the specific port.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statelist
The list of pins state.
- async DO_togglePort_async(port)
Toggle all pins in the specific port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- statelist
The list of pins state.
- DO_writePins(port, pin, value, timeout=3)
Write high or low value to the specific pin.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set.
For example, you want to set pin 0, pin 1 and pin 5.
pin = [0, 1, 5].
- valueint or list
Pin number you want to set high or low.
High = 1, Low = 0.
For example, set pin 0 and pin 1 to high, and pin 5 to low.
value = [1, 1, 0].
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_writePins_async(port, pin, value)
Write high or low value to the specific pin with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- pinint or list
Pin number you want to set.
For example, you want to set pin 0, pin 1 and pin 5.
pin = [0, 1, 5].
- valueint or list
Pin number you want to set high or low.
High = 1, Low = 0.
For example, set pin 0 and pin 1 to high, and pin 5 to low.
value = [1, 1, 0].
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- DO_writePort(port, value, timeout=3)
Write high or low value to all pins in the specefic port.
- Parameters
- portint
See here for available ports of different WPC devices.
- valueint or list
Pin number you want to set digital high or low.
High = 1, Low = 0.
For example if intput type is list
you want to write pin 0 and pin 2 to high, others to low.
[1, 0, 1, 0, 0, 0, 0, 0] in LSB.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async DO_writePort_async(port, value)
Write high or low value to all pins in the specefic port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- valueint or list
Pin number you want to set digital high or low.
High = 1, Low = 0.
For example if intput type is list
you want to write pin 0 and pin 2 to high, others to low.
[1, 0, 1, 0, 0, 0, 0 ,0] in LSB.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Encoder_close(channel, timeout=3)
Close encoder on the specific channel.
- async Encoder_close_async(channel)
Close encoder on the specific channel with async mode.
- Encoder_getDirection(channel, timeout=3)
Get encoder direction on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
The direction of encoder.
- async Encoder_getDirection_async(channel)
Get encoder direction on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- Returns
- statusint
The direction of encoder.
- Encoder_open(channel, timeout=3)
Open encoder on the specific channel.
- async Encoder_open_async(channel)
Open encoder on the specific channel with async mode.
- Encoder_readFrequency(channel, timeout=3)
Read the value of encoder frequency on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- frequencyfloat
Encoder frequency.
- async Encoder_readFrequency_async(channel)
Read the value of encoder frequency on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- Returns
- positionint
Encoder frequency.
- Encoder_readPosition(channel, timeout=3)
Read the value of encoder position on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- positionint
Encoder position.
- async Encoder_readPosition_async(channel)
Read the value of encoder position on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- Returns
- positionint
Encoder position.
- Encoder_setDirection(channel, direction, timeout=3)
Set encoder direction on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- directionint
1: Forward. -1: Reverse.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Encoder_setDirection_async(channel, direction)
Set encoder direction on the specific channel with async mode.
- Encoder_setFreqWindow(channel, window_size, timeout=3)
Set moving window size on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- window_sizefloat
Moving window size. Default value is 100ms, and the minimum value is 20 ms.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Encoder_setFreqWindow_async(channel, window_size)
Set moving window size on the specific channel with async mode.
- Encoder_setPosition(channel, position, timeout=3)
Set encoder position value on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- position: int 64
The encoder position.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Encoder_setPosition_async(channel, position)
Set encoder position value on the specific channel with async mode.
- Encoder_start(channel, timeout=3)
Start reading encoder on the specific channel.
- async Encoder_start_async(channel)
Start reading encoder on the specific channel with async mode.
- Encoder_stop(channel, timeout=3)
Stop reading encoder on the specific channel.
- async Encoder_stop_async(channel)
Stop reading encoder on the specific channel with async mode.
- Logger_openFile(filename, clear_old=True, verbose=True)
Open CSV file.
- Parameters
- filenamestr
The file name.
- clear_oldbool, default: True
Whether to clear old data (if the file alread exists) or not.
- verbosebool, default: True
Whether to print message out.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_write2DList(value_mat)
Write list of list into file.
- Parameters
- value_matlist of list
The list of list of data to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_writeHeader(header)
Write header into file.
- Parameters
- headerlist of str
Header to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_writeList(value_list)
Write list into file.
- Parameters
- value_listlist
The list of data to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Logger_writeValue(value)
Write value into file.
- Parameters
- valueobject
The data to be written.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- PWM_close(channel, timeout=3)
Close PWM on the specific channel.
- async PWM_close_async(channel)
Close PWM on the specific channel with async mode.
- PWM_open(channel, timeout=3)
Open PWM on the specific channel.
- async PWM_open_async(channel)
Open PWM on the specific channel with async mode.
- PWM_setDutyCycle(channel, duty_cycle, timeout=3)
Set PWM duty cycle on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- duty_cyclefloat
It is the amount of time a digital signal is in the active state relative to the period of the signal.(%)
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async PWM_setDutyCycle_async(channel, duty_cycle)
Set PWM duty cycle on the specific channel with async mode.
- Parameters
- channelint
See here for available channel of different WPC devices.
- duty_cyclefloat
It is the amount of time a digital signal is in the active state relative to the period of the signal. (%)
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- PWM_setFrequency(channel, frequency, timeout=3)
Set PWM frequency on the specific channel.
- Parameters
- channelint
See here for available channel of different WPC devices.
- frequencyfloat
frequency (HZ)
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async PWM_setFrequency_async(channel, frequency)
Set PWM frequency on the specific channel with async mode.
- PWM_start(channel, timeout=3)
Start PWM on the specific channel.
- async PWM_start_async(channel)
Start PWM on the specific channel with async mode.
- PWM_stop(channel, timeout=3)
Stop PWM on the specific channel.
- async PWM_stop_async(channel)
Stop PWM on the specific channel async mode.
- Sys_getDeviceAlias(timeout=3)
Get device alias name.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- Alias namestring
The alias name of the device.
- async Sys_getDeviceAlias_async()
Get device alias name with async mode.
- Returns
- Alias namestring
The alias name of the device.
- Sys_getDriverInfo(timeout=3)
Get device firmware information.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- driver_infolist of three string
driver_info[0]: Model name.driver_info[1]: Mode.driver_info[2]: Firmware version.
- async Sys_getDriverInfo_async()
Get device firmware information with async mode.
- Returns
- driver_infolist of three string
driver_info[0]: Model name.driver_info[1]: Mode.driver_info[2]: Firmware version.
- Sys_getMode(slot, timeout=3)
Get the mode from a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- str_str
Mode of slot.
- async Sys_getMode_async(slot)
Get the mode from a given slot with async mode.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- Returns
- str_str
Mode of slot.
- Sys_getPinModeInPort(port, timeout=3)
Get pin mode in specific port.
- Parameters
- portint
See here for available ports of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- pinsint
How many pins in specific port.
- pin_modelist of 8 string
[pin0, pin1,……pin7]
pinmode : Disabled, Idle, DI, DO, UART, I2C, SPI, CAN, PWM and ADC.
- async Sys_getPinModeInPort_async(port)
Get pin mode in specific port with async mode.
- Parameters
- portint
See here for available ports of different WPC devices.
- Returns
- pinsint
How many pins in specific port.
- pin_modelist of 8 string
[pin0, pin1,……pin7]
pinmode : Disabled, Idle, DI, DO, UART, I2C, SPI, CAN, PWM and ADC.
- Sys_getPythonVersion(timeout=3)
Get python software version.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- versionstring
- async Sys_getPythonVersion_async()
Get python software version with async mode.
- Returns
- versionstring
- Sys_getRTC(timeout=3)
Get RTC date and time.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- str_str
- Date and time represented by “A-B-C, D:E:F”.
“A” is year.
“B” is month.
“C” is day.
“D” is hour.
“E” is minute.
“F” is second.
- async Sys_getRTC_async()
Get RTC date and time with async mode.
- Returns
- str_str
- Date and time represented by “A-B-C, D:E:F”.
“A” is year.
“B” is month.
“C” is day.
“D” is hour.
“E” is minute.
“F” is second.
- Sys_getSerialNumber(timeout=3)
Get serial number.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- str_str
Serial number represented by string of 8 characters.
- async Sys_getSerialNumber_async()
Get serial number with async mode.
- Returns
- str_str
Serial number represented by string of 8 characters.
- Sys_reboot(timeout=3)
Reboot the device.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_reboot_async()
Reboot the device with async mode.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_setAIOMode(slot, timeout=3)
Set the AIO state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setAIOMode_async(slot)
Set the AIO state on a given slot with async mode.
- Sys_setDIMode(slot, timeout=3)
Set the DI state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDIMode_async(slot)
Set the DI state on a given slot with async mode.
- Sys_setDIOMode(slot, timeout=3)
Set the DIO state for the slot in the connected WPC device.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDIOMode_async(slot)
Set the DIO state for the slot in the connected WPC device with async mode.
- Sys_setDOMode(slot, timeout=3)
Set the DO state for the slot in the connected WPC device.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDOMode_async(slot)
Set the DO state for the slot in the connected WPC device with async mode.
- Sys_setDeviceAlias(alias, timeout=3)
Set the alias name of the device.
- Parameters
- aliasstr
The alias name of the device
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setDeviceAlias_async(alias)
Set the alias name of the device.
- Parameters
- aliasstr
The alias name of the device
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_setIdleMode(slot, timeout=3)
Set the IDLE state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setIdleMode_async(slot)
Set the IDLE state on a given slot with async mode.
- Sys_setMotionMode(slot, timeout=3)
Set the motion state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setMotionMode_async(slot)
Set the motion state on a given slot with async mode.
- Sys_setRTC(year, month, day, hour, minute, second, timeout=3)
Set RTC date and time.
- Parameters
- yearint
year (CE).
- monthint
month (1~12).
- dayint
day (1~31).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setRTC_async(year, month, day, hour, minute, second)
Set RTC date and time with async mode.
- Parameters
- yearint
year (CE).
- monthint
month (1~12).
- dayint
day (1~31).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_setSwitchMode(slot, timeout=3)
Set the switch state on a given slot.
- Parameters
- slotint
Slot number. See here for available slot of different WPC devices.
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_setSwitchMode_async(slot)
Set the switch state on a given slot with async mode.
- Sys_startRTCAlarm(mode, day, hour, minute, second, timeout=3)
Start RTC time to alarm AI.
- Parameters
- modeint
0: Day value interpreted as calendar day. 1: Day value interpreted as weekday.
- dayint
Celendar day (1~31)/ Weekday (1~7).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_startRTCAlarm_async(mode, day, hour, minute, second)
Start RTC time to alarm AI with async mode.
- Parameters
- modeint
0: Day value interpreted as calendar day. 1: Day value interpreted as weekday.
- dayint
Celendar day (1~31)/ Weekday (1~7).
- hourint
hour (24-hour clock) (0~23).
- minuteint
minute (0~59).
- secondint
second (0~59).
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- Sys_stopRTCAlarm(timeout=3)
Stop alarming.
- Parameters
- timeoutint
Specify the time (sec) to wait before reporting a timeout error. The default is 3 s.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- async Sys_stopRTCAlarm_async()
Stop alarming with async mode.
- Returns
- statusint
Return 0 if executed successfully; return error code otherwise. See here for corresponding error messages.
- close()
Close USB device handle.
- Parameters
- verbose: bool, default: True
Whether to print out messages or not.
- Returns
- None
- connect(serial_num='default', verbose=True)
Connect handle to USB device.
- Parameters
- serial_numstr
Serial number of the WPC device to connect to.
- verbose: bool, default: True
Whether to print out messages or not
- Returns
- None
- disconnect(verbose=True)
Disconnect handle from USB device.
- Parameters
- verbose: bool, default: True
Whether to print out messages or not.
- Returns
- None